Self-Balancing Robot
TerasicのSelf-Balancing Robotは、Terasic robtic exepertsによって設計および製造された多機能ロボットです。 組込みソリューションに最適な軽量のSoCプラットフォームであるTerasicのDE10-Nano上に構築され、最先端の制御アルゴリズムを備えたRobotは、開発者に独自のロボット革新を生み出すための完璧な出発点を提供します。
このロボットは、加速度センサーとジャイロスコープを介してリアルタイムで姿勢認識を行い、モーターを制御して姿勢を調整することでバランスをとることができます。 ロボットは、姿勢アルゴリズムを実装し、動作制御を実行し、そして前進、左右への移動、物体追従および障害物回避などの自律的な動作を実行することができる。
自己バランスロボットはブルートゥース/ Wi-FiモジュールとIR受信機を装備し、ユーザーはスマートフォンAPPとIRリモコンでロボットを遠隔操作できます。
顧客開発用のDE10-Nanoボードには多くの周辺機器インタフェース(イーサネットポート、Uartポート、HDMI-TXポート、GPIOコネクタ、USB Blaster IIポート)があります。 ハードウェアのほかに、ロボットにはオープンソースの例も含まれています。 サンプルコードに基づいて、開発者は彼らのアプリケーションデザインを素早く実装することができます。
ロボットは3つのリチウム電池で動いています。 ロボットに電力を完全に供給できないときにリチウム電池が充電を開始した場合、完全充電には最大2時間かかります。
セルフバランスロボットは2枚のボードで構成されています。
- DE10-Nano SoC FPGAボード:ARMプロセッサを搭載し、Linuxシステムを実行できます。 統合された110K LEは、ロジック制御を実装できます。 このボードは、Uart、Ethernet、GPIO、その他多くの周辺機器インタフェースをサポートしています。
- モータードライバーボード:DE10-Nanoボードからモーター制御信号を受信し、モータードライバーボード上のモータードライバーチップを通してモーターを駆動します。 また、Wi-Fi / BluetoothおよびIR Receiverから制御信号を受信し、それをさらなる処理のためにDE10-Nanoにフィードバックすることもできます。 さらに、このボードはモーショントラック、バッテリ電源電圧値、超音波モジュールからの距離情報など、多くのシステムデータをDE10-Nanoに提供します。
ロボットの仕様詳細:
DE10-ナノボード:
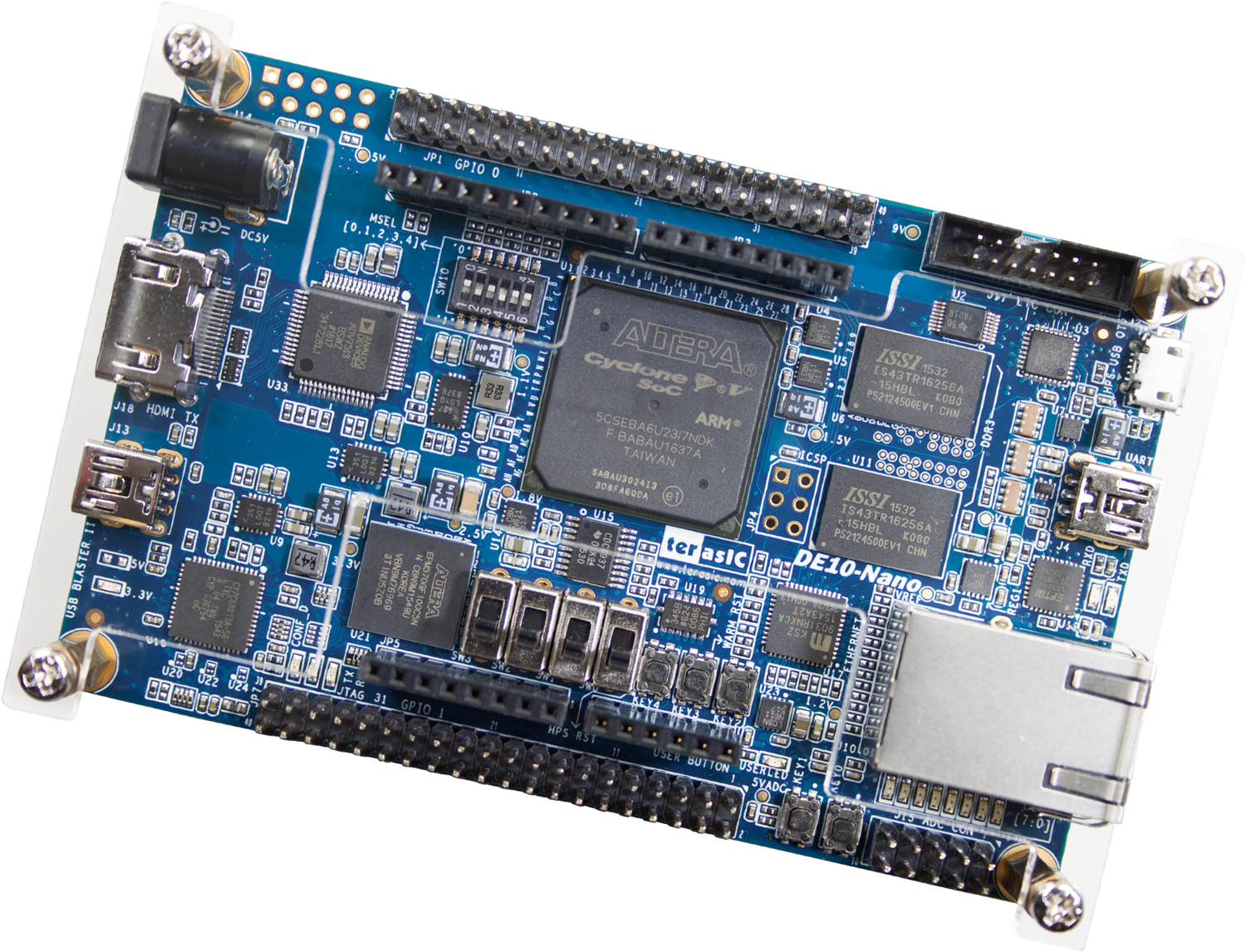
- FPGAデバイス
- IntelCyclone®V SE 5CSEBA6U23I7デバイス(110K LE)
- シリアル設定デバイス - EPCS64(リビジョンB2以降)
- USB-Blaster IIはプログラミング用にオンボードです。 JTAGモード
- DVI 1.0およびHDCP v1.4と互換性のあるHDMI TX
- 2つの押しボタン
- 4スライドスイッチ
- 8個の緑色のユーザーLED
- クロックジェネレータからの3つの50MHzクロックソース
- 40ピン拡張ヘッダ×2
- 1つのArduino拡張ヘッダー(Uno R3互換)、Arduinoシールドと接続可能
- 1つの10ピンアナログ入力拡張ヘッダ(Arduinoアナログ入力と共有)
- A / Dコンバータ、FPGAとの4ピンSPIインタフェース
- HPS(ハードプロセッサシステム)
- 800MHzデュアルコアARM Cortex-A9プロセッサ
- 1GB DDR3 SDRAM(32ビットデータバス)
- RJ45コネクタ付き1ギガビットイーサネットPHY
- USB OTGポート、USB Micro-ABコネクタ
- マイクロSDカードソケット
- 加速度計(I2Cインターフェース+割り込み)
- UART to USB、USBミニBコネクタ
- ウォームリセットボタンとコールドリセットボタン
- 1つのユーザーボタンと1つのユーザーLED
- LTC 2x7拡張ヘッダー
モータードライバーボード:
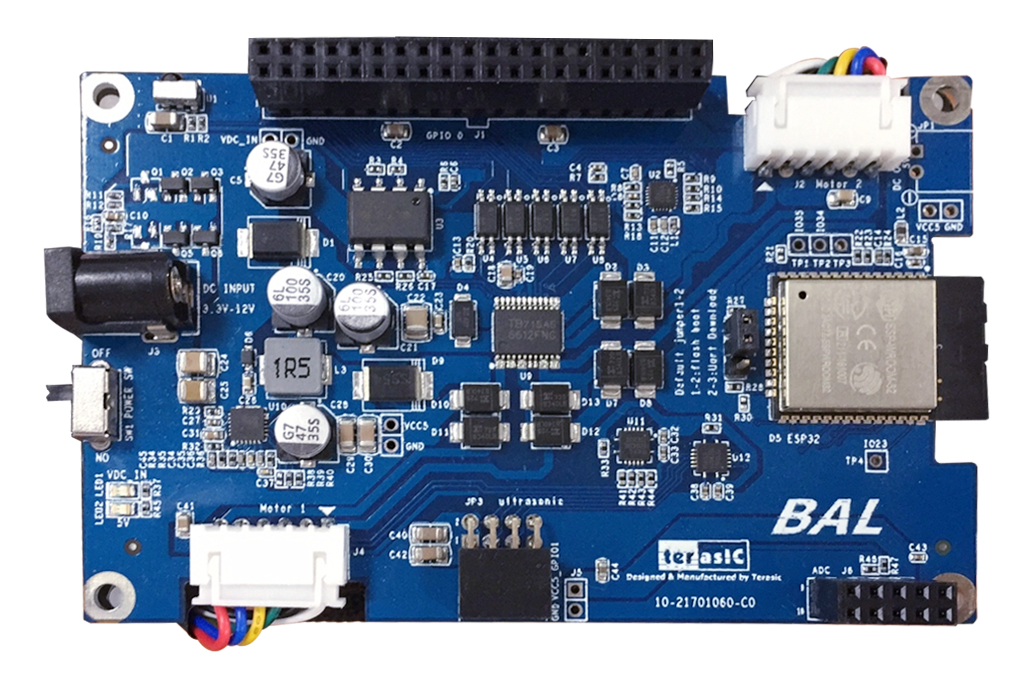
- DCモータードライバーとコネクター
- Wi-Fi / Bluetoothモジュール
- DE10-ナノボードへの2X20 GPIOコネクタ
- IRレシーバー
- ADCパワーモニタ
- 超音波コネクタ
- 12V電源入力
- FPGAボードへの5V電源出力
- 6軸(ジャイロ+加速度計)MEMSモーショントラッキング
書類
| タイトル | バージョン | サイズ(KB) | 追加日 | ダウンロード |
|---|
| 01.クイックスタートガイド |
|
2286 |
2018-08-13 |

|
| 02.はじめよう |
|
2653 |
2018-08-13 |
|
| 03.ハードウェアマニュアル |
|
3374 |
2018-08-13 |
|
| 04.ユーザーガイド |
|
2530 |
2018-08-13 |
|
|
|
|
|
|
|---|
CD-ROM
| タイトル | バージョン | サイズ(KB) | 追加日 | ダウンロード |
|---|
| |
|---|
| 自己バランスロボットシステムCD |
1.0.4
|
|
2018-09-25 |
|
| DE10-Nano CD-ROM(rev。Cハードウェア) |
|
|
2018-04-03 |
| |
|---|
|
|
|
|
Android用アプリ
| タイトル | バージョン | サイズ(KB | 追加日 | ダウンロード |
|---|
| 自己バランスロボットAPP |
V3
|
1739 |
2018-08-13 |

|
iOS用アプリ
| タイトル | バージョン | サイズ(KB | 追加日 | ダウンロード |
|---|
| 自己バランスロボットAPP |
V3
|
|
2018-04-02 |
|
Linux BSP(ボードサポートパッケージ):MicroSDカードの画像
| タイトル | バージョン | サイズ(KB | 追加日 | ダウンロード |
|---|
| HPSデモLinuxイメージ |
1.2
|
|
2018-04-19 |
|
|
|
|
|
|
| | | | |
| | | | |
セルフバランスロボットキットのパッケージ内容:

- 自己バランスロボット
- リチウム電池
- DC電源ケーブル
- IRリモコン
- ミニUSBケーブル
- マイクロUSBケーブル
- クイックスタートガイド




